La géométrie différentielle est une branche fascinante des mathématiques qui applique les outils du calcul différentiel à l'étude de la géométrie. Elle nous permet de comprendre et de décrire des espaces qui ne sont pas nécessairement plats, comme la surface de la Terre ou des formes plus complexes dans des dimensions supérieures. Au cœur de cette discipline se trouvent les variétés différentielles, des espaces qui, bien que potentiellement courbés, ressemblent à l'espace euclidien de base à petite échelle.
Les Fondations : Variétés Topologiques et Cartes Locales
Pour appréhender la géométrie différentielle, il est essentiel de commencer par la notion de variété topologique. Il s'agit d'un espace topologique qui, localement, ressemble à l'espace euclidien de dimension n (noté ℝⁿ). Imaginez la surface de la Terre : bien qu'elle soit sphérique, une petite région de cette surface peut être approximée par un plan plat. Ces "ressemblances locales" sont formalisées par des applications appelées cartes. Une carte est un homéomorphisme, c'est-à-dire une fonction continue avec une inverse continue, qui établit une correspondance entre une région ouverte de la variété et un ensemble ouvert dans ℝⁿ. Ces cartes définissent des systèmes de coordonnées locales, nous permettant de "mesurer" et de décrire la variété dans ces régions.
La Structure Différentielle : Lisser les Transitions
La notion de "variété différentielle" va plus loin que la simple structure topologique. Elle exige que les "changements de coordonnées" entre différentes cartes soient suffisamment réguliers, c'est-à-dire différentiables. Lorsque nous passons d'une carte à une autre pour décrire la même partie de la variété, les fonctions de transition (ou applications de changement de coordonnées) doivent être différentiables. Cette exigence de régularité est cruciale car elle permet de généraliser les opérations du calcul différentiel et intégral aux variétés. Elle autorise la définition d'applications différentiables entre variétés, de champs de vecteurs (qui représentent des directions et des vitesses locales) et de leurs courbes intégrales (les trajectoires suivies par ces champs de vecteurs).
Les "espaces courbes" localement modelés sur l'espace euclidien de dimension n sont donc les objets de base de la topologie différentielle et de la géométrie différentielle.
MQD 1 : Variété Différentielle ?
Un Panorama Historique : De la Courbure des Surfaces aux Concepts Modernes
L'étude des surfaces, comme les sphères, les cônes et les cylindres, a une longue histoire en géométrie. Ces surfaces peuvent être étudiées de deux manières principales :
- De façon extrinsèque : En considérant leur plongement dans un espace euclidien plus grand (par exemple, une sphère plongée dans ℝ³). Les propriétés étudiées dépendent alors de la manière dont la surface est "enroulée" ou "courbée" dans cet espace ambiant.
- De façon intrinsèque : En se concentrant uniquement sur les propriétés qui peuvent être déterminées à partir de mesures effectuées sur la surface elle-même, sans référence à un espace extérieur. Par exemple, la distance entre deux points mesurée le long de courbes tracées sur la surface.
Dès le XVIIe siècle, le développement du calcul infinitésimal a permis une analyse plus systématique des surfaces, notamment des surfaces de révolution. Euler, au XVIIIe siècle, a obtenu des formules importantes concernant la courbure des sections planes d'une surface et s'est intéressé aux surfaces paramétriques.
La contribution véritablement fondatrice à la théorie des surfaces vient de Carl Friedrich Gauss au début du XIXe siècle. Dans ses remarquables articles de 1825 et 1827, Gauss a introduit la notion de géométrie intrinsèque d'une surface. Il a démontré que certaines propriétés géométriques, comme la courbure de Gauss, sont indépendantes du plongement de la surface dans l'espace euclidien. Son célèbre theorema egregium (théorème remarquable) stipule que la courbure de Gauss est un invariant intrinsèque, inchangé par des isométries locales (des transformations qui préservent les distances localement).
Le XIXe siècle a été l'âge d'or de la théorie des surfaces, avec des contributions majeures de géomètres comme Darboux, qui a compilé une grande partie de ces résultats dans son traité en quatre volumes.
La Courbure : Une Notion Clé en Géométrie Différentielle
La courbure est un concept central en géométrie différentielle, permettant de quantifier à quel point un espace est "courbé". Pour une surface lisse plongée dans l'espace euclidien usuel ℝ³, plusieurs définitions de la courbure existent :
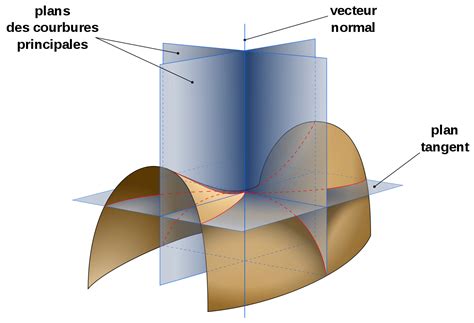
- Courbure de Gauss : Définie comme le produit des courbures principales en un point. Les courbures principales sont les courbures maximale et minimale des courbes obtenues en coupant la surface par des plans perpendiculaires au plan tangent au point étudié. Le theorema egregium de Gauss nous dit que la courbure de Gauss est intrinsèque.
- Courbure Moyenne : Définie comme la demi-somme des courbures principales. Contrairement à la courbure de Gauss, la courbure moyenne n'est pas toujours intrinsèque ; par exemple, un cylindre a une courbure moyenne non nulle, alors que le plan a une courbure de Gauss nulle.
Surfaces Spéciales et Leurs Propriétés
L'étude des surfaces a révélé des exemples fascinants avec des propriétés uniques :
- Surfaces de Révolution : Obtenues en faisant tourner une courbe autour d'un axe. Certaines de leurs propriétés étaient connues dès l'Antiquité.
- Surfaces Réglées : Surfaces engendrées par le déplacement d'une droite dans l'espace. La courbure de Gauss s'annule si et seulement si la surface est "développable", c'est-à-dire qu'elle peut être "dépliée" sur un plan sans déformation.
- Surfaces Minimales : Ce sont des surfaces qui minimisent leur aire pour une frontière donnée. Elles ont une interprétation physique concrète, ressemblant à la forme prise par un film de savon. Des exemples célèbres incluent la caténoïde, l'hélicoïde et les surfaces de Scherk.
- Surfaces de Courbure Constante : Le plan euclidien et le cylindre ont une courbure de Gauss nulle. La sphère unité a une courbure de Gauss constante égale à 1. La pseudosphère, engendrée par la rotation d'une tractrice, possède une courbure de Gauss constante égale à -1. La géométrie de la pseudosphère est intrinsèquement liée à celle du plan hyperbolique.
La Métrique Riemannienne : Mesurer les Distances sur une Variété
Pour mesurer les longueurs des courbes, les angles entre elles et les aires des régions sur une variété, on utilise une métrique riemannienne. À un niveau infinitésimal, cette métrique agit comme un produit scalaire sur l'espace tangent à chaque point de la variété. Elle confère à la variété l'aspect d'un espace euclidien local, mais permet de révéler des invariants comme la courbure lorsqu'on considère la variété dans son ensemble.
Initialement, les métriques riemanniennes étaient étudiées pour des surfaces plongées dans ℝ³. La métrique était donnée par une matrice définie positive d'ordre 2, dépendant de manière différentiable des coordonnées locales. La formalisation moderne des variétés différentielles a permis d'abstraire cette notion, où la métrique est définie sur la variété elle-même, indépendamment d'un plongement spécifique.
Géométrie Intrinsèque vs. Géométrie Extrinsèque
La distinction entre géométrie intrinsèque et extrinsèque est fondamentale. Du point de vue intrinsèque, deux surfaces sont considérées comme "les mêmes" si l'une peut être "étalée" sur l'autre sans déformation, c'est-à-dire s'il existe une isométrie entre elles. Par exemple, un cylindre est localement isométrique au plan.
Du point de vue extrinsèque, deux surfaces sont "les mêmes" si elles sont congruentes dans l'espace ambiant. La seconde forme fondamentale, qui dépend du plongement dans l'espace euclidien, est un outil clé pour étudier la géométrie extrinsèque. Elle permet de définir la courbure moyenne, qui est un invariant extrinsèque.
Les Géodésiques : Les Chemins les Plus Courts
Les géodésiques sur une variété sont les courbes qui minimisent localement la longueur entre deux points. Elles généralisent la notion de droite dans l'espace euclidien. Sur une surface courbe, les géodésiques peuvent être visualisées comme la trajectoire d'un ruban élastique tendu entre deux points. Leur détermination mathématique implique la résolution d'équations aux dérivées partielles issues du calcul des variations. Les géodésiques sont essentielles pour comprendre la géométrie intrinsèque d'une variété.
Extensions et Domaines Connexes
La géométrie différentielle a donné naissance à de nombreux domaines de recherche actifs :
- Géométrie Riemannienne : Étude des variétés munies de métriques riemanniennes.
- Géométrie de Finsler : Extension de la géométrie riemannienne où la "distance" dépend non seulement de la position mais aussi de la direction.
- Géométries Pseudo-Riemanniennes : Étude de variétés munies de formes bilinéaires symétriques qui ne sont pas nécessairement positives.
- Géométrie Symplectique : Étude des formes symplectiques, essentielles pour la formulation mathématique de la mécanique classique.
- Géométrie de Contact : Branche connexe à la géométrie symplectique, étudiant les structures en dimension impaire.
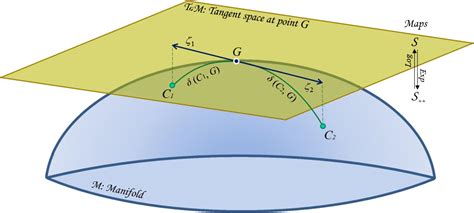
L'Espace Tangent et les Champs de Vecteurs
En chaque point d'une variété différentielle, on peut définir un espace tangent. Cet espace vectoriel capture toutes les directions et vitesses possibles pour s'écarter du point. Pour une variété de dimension n, l'espace tangent est un espace vectoriel de dimension n (isomorphe à ℝⁿ).
Un champ de vecteurs est une assignation, en chaque point de la variété, d'un vecteur de l'espace tangent en ce point. Les champs de vecteurs différentiables se comportent comme des équations différentielles indépendantes du temps, décrivant le mouvement local sur la variété. Les courbes intégrales d'un champ de vecteurs sont les trajectoires suivies par ces "mouvements".
Vers des Dimensions Supérieures et des Structures Générales
Les concepts de la géométrie différentielle s'étendent naturellement à des dimensions arbitraires. La question de savoir si toute structure métrique sur une surface peut provenir d'un plongement dans un espace euclidien de dimension supérieure (comme ℝ⁴ ou ℝ³) est un problème ouvert connu sous le nom de "problème de Weyl". Des résultats importants ont été obtenus par Janet et Élie Cartan, généralisant les notions de plongement aux variétés riemanniennes de dimension n dans des espaces de dimension supérieure.
En résumé, la géométrie différentielle fournit un cadre puissant pour étudier des espaces courbes en utilisant les outils du calcul. Des surfaces classiques aux variétés de dimensions supérieures, elle explore la courbure, les distances et les structures locales pour révéler les propriétés intrinsèques et extrinsèques de ces objets mathématiques.
tags: #revetement #geometrie #differentielle #definition